
We aim to model, predict, and simulate the motion of unregulated crowds of traffic participants. We take a geometric approach and model traffic agent motion as a constrained optimization problem in the velocity space of agents. The objective of the problem is to maximize the cooperative navigation efficiency for all agents, while the constraints are induced by collision avoidance, vehicle kinematics, and the road context. We have developed two motion models for two typical scenarios, including crowds of pedestrians in open spaces and heterogenous traffic crowds on urban roads. Making use of these models, a planning system can perform more accurate long-term predictions and thus enhance the planning performance. We have further released an open-source simulator that uses these models to simulate crowd-driving in real-world urban maps. We envision the simulator to facilitate training, testing, and development of crowd-driving algorithms.
PORCA
Yuanfu Luo, Panpan Cai, Aniket Bera, David Hsu, Wee Sun Lee, and Dinesh Manocha. PORCA: Modeling and planning for autonomous driving among many pedestrians. IEEE Robotics and Automation Letters, 2018. [PDF]
This paper presents a planning system for autonomous driving among many pedestrians. A key ingredient of our approach is PORCA, a pedestrian motion prediction model that accounts for both a pedestrian’s global navigation intention and local interactions with the vehicle and other pedestrians. Since the autonomous vehicle does not know the pedestrian’s intention a priori, it requires a planning algorithm to reason about the uncertainty on pedestrian intentions. Our planning system combines a POMDP algorithm with the pedestrian motion model and runs in near real-time. Experiments show that it enables a robot vehicle to drive safely, efficiently, and smoothly among a dense crowd of pedestrians.
GAMMA
Yuanfu Luo, Panpan Cai, David Hsu, and Wee Sun Lee. GAMMA: A general agent motion prediction model for autonomous driving. Arxiv, 2019. [PDF][Code]
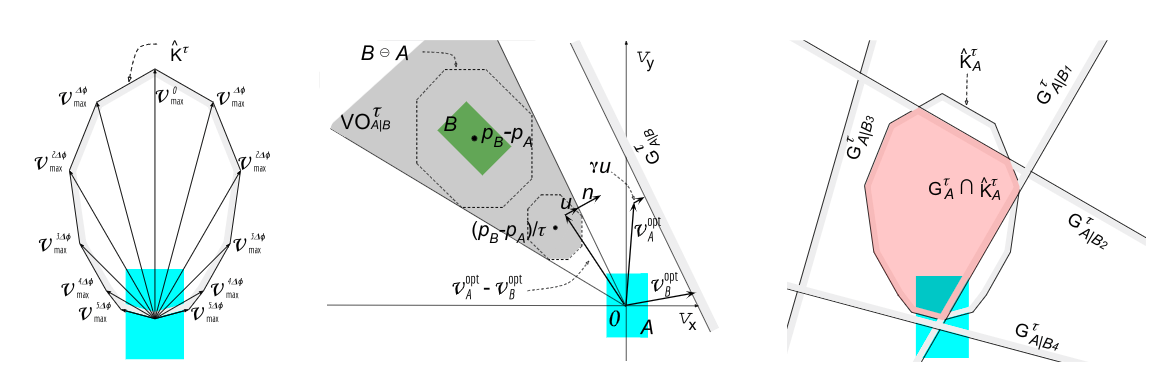
Urban environments usually contain mixed traffic of heterogeneous agents such as pedestrians, bicycles, cars, buses, etc.. In such environments, traffic motion prediction becomes extremely challenging because of the diverse dynamics and geometry of traffic agents, complex road conditions, and intensive interactions among the agents. In this paper, we proposed GAMMA, a general agent motion prediction model for autonomous driving, that can predict the motion of heterogeneous traffic agents with different kinematics, geometry, human agents’ inner states, etc.. GAMMA formalizes motion prediction as geometric optimization in the velocity space, and integrates physical constraints and human inner states into this unified framework. Our results show that GAMMA outperforms both geometric and learning-based approaches significantly on diverse real-world datasets.
STAR
Cunjun Yu*, Xiao Ma*, Jiawei Ren, Haiyu Zhao, Shuai Yi. Spatio-Temporal Grpah Transformer Networks for Pedestrian Trajectory Prediction. in Proc. European Conf. on Computer Vision, 2020. [PDF][Code][Project]
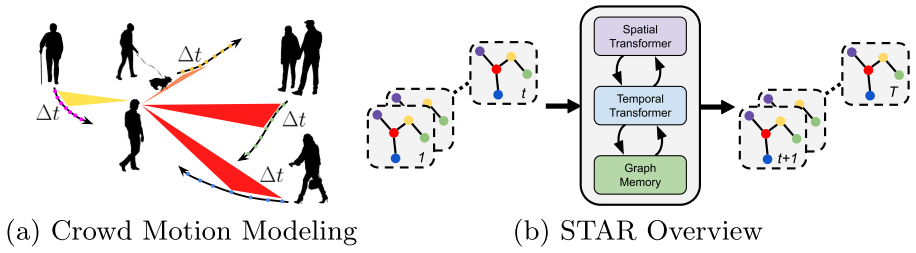
Understanding crowd motion dynamics is critical to real-world applications, e.g., surveillance systems and autonomous driving. This is challenging because it requires effectively modeling the socially aware crowd spatial interaction and complex temporal dependencies. We believe attention is the most important factor for trajectory prediction. In this paper, we present STAR, a Spatio-Temporal grAph tRansformer framework, which tackles trajectory prediction by only attention mechanisms. STAR models intra-graph crowd interaction by TGConv, a novel Transformer-based graph convolution mechanism. The inter-graph temporal dependencies are modeled by separate temporal Transformers. STAR captures complex spatio-temporal interactions by interleaving between spatial and temporal Transformers. To calibrate the temporal prediction for the long-lasting effect of disappeared pedestrians, we introduce a read-writable external memory module, consistently being updated by the temporal Transformer. We show that with only attention mechanism, STAR achieves state-of-the-art performance on 5 commonly used real-world pedestrian prediction datasets.
SUMMIT
Panpan Cai*, Yiyuan Lee*, Yuanfu Luo, David Hsu. SUMMIT: A Simulator for Urban Driving in Massive Mixed Traffic. in Proc. IEEE Int. Conf. on Robotics & Automation, 2020. [PDF][Code]
This paper presents SUMMIT, a high-fidelity simulator that facilitates the development and testing of crowd-driving algorithms. By leveraging the open-source OpenStreetMap map database and the GAMMA motion model developed in our earlier work, SUMMIT simulates dense, unregulated urban traffic for heterogeneous agents at any worldwide location that OpenStreetMap supports. SUMMIT is built as an extension of CARLA and inherits from it the physics and visual realism for autonomous driving simulation. SUMMIT supports a wide range of applications, including perception, vehicle control and planning, and end-to-end learning. We provide real-world benchmark scenes to show that SUMMIT generates complex, realistic traffic behaviors in challenging crowd-driving settings. The simulator also comes with a context-aware POMDP planner as a driving expert and a reference to future crowd-driving algorithms.